Engineers have long been interested in making water-faring robots. We’ve seen robots fashioned after tuna, suckerfish, octopuses and more. Now a new type of aquabot is swimming onto the scene. Researchers from Korea University and Ajou University designed insect-sized robots that can wade through the water employing hydrogel fins and paddles. They describe the process behind making and operating these robots in a new paper out this week in Science Robotics.
Hydrogels are 3D structures made from crosslinked molecules. They can be made from synthetic or natural materials and tend to swell in water. Some hydrogels can even change shape in response to external stimuli like variations in pH, temperature, ionic strength, solvent type, electric and magnetic fields, light, and more.
The medical industry has been exploring how to use hydrogels for applications such as wound dressing. But robot engineers have also been interested in using hydrogel to make soft robots—just check out this nifty drug delivering jellyfish-like aquabot from 2008. Of course, the design of such robots are always being reimagined and optimized.
[Related: A tuna robot reveals the art of gliding gracefully through water]
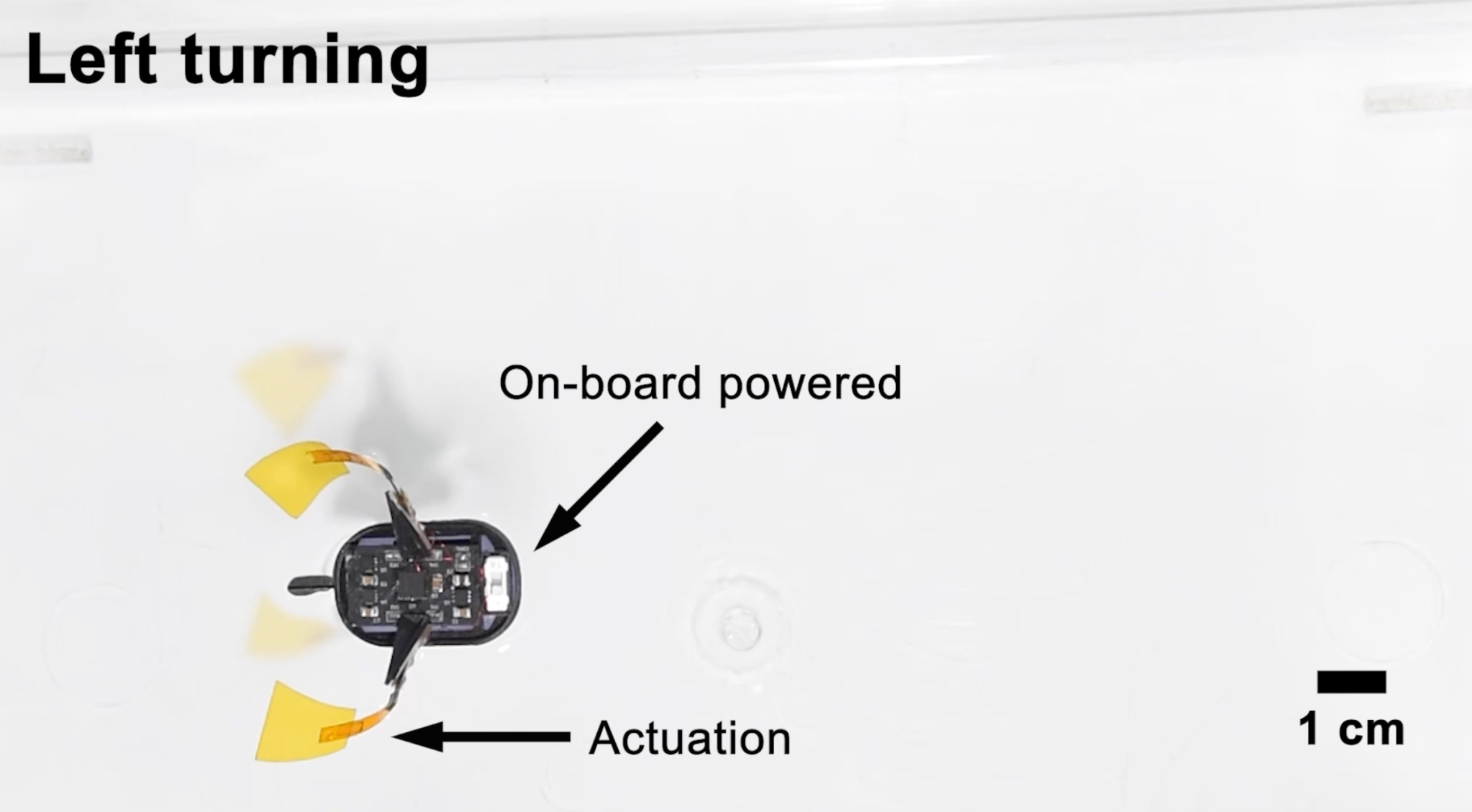
The new, free-floating bots from Korea University and Ajou University team have porous hydrogel paddles that are coated with a webbing of nanoparticles, or “wrinkled nanomembrane electrodes.” Onboard electronics were shrunk down to the size of a penny into the body of the robot. Inside the body is an actuator, or motor, that can apply different voltages of electric potential across the hydrogel. To move the robot, researchers can alter an external electric field to induce electroosmosis-driven hydraulic pumping—where charged surfaces can change the water flow around it.
“In particular, our soft aquabots based on WNE actuators could be constructed without any high-voltage converter and conventional transmission system, which have considerably limited the miniaturization of soft robots,” the researchers wrote. “However, to be a fully autonomous robotic system, sensing components should be further integrated for the recognition of position and orientation of the robot. We believe that our approach could provide a basis for developing lightweight, high-performance soft actuators and robots at small scale that require a variety of motions under electric stimuli.”
Watch the tiny aquabot in motion below:
