When we think of robots, we typically think of clunky gears, mechanical parts, and jerky movements. But a new generation of robots have sought to break that mold.
Since Czech playwright Karel Čapek first coined the term “robot” in 1920, these machines have evolved into many forms and sizes. Robots can now be hard, soft, large, microscopic, disembodied or human-like, with joints controlled by a range of unconventional motors like magnetic fields, air, or light.
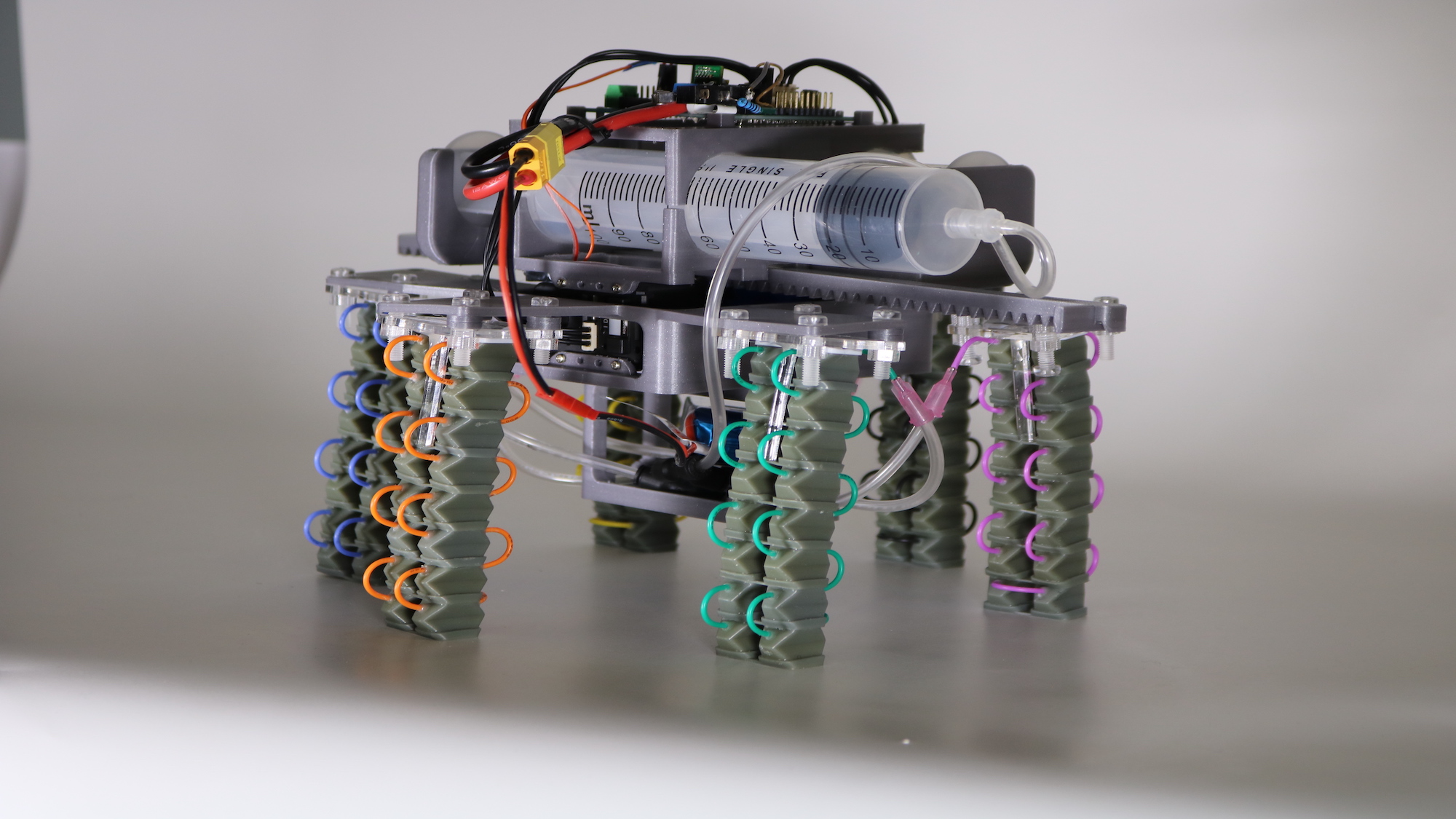
A new six-legged soft robot from a team of engineers at Cornell University has put its own spin on motion, using fluid-powered motors to achieve complex movements. The result: A free-standing bug-like contraption carrying a backpack with a battery-powered Arbotix-M controller and two syringe pumps on top. The syringes pump fluid in and out of the robot’s limbs as it ambles along a surface at a rate of 0.05 body lengths per second. The design of the robot was described in detail in a paper published in the journal Advanced Intelligent Systems last week.

The robot was born out of Cornell’s Collective Embodied Intelligence Lab, which is exploring ways that robots can think and collect information about the environment with other parts of their body outside of a central “brain,” kind of like an octopus. In doing this, the robot would rely on its version of reflexes, instead of on heavy computation, to calculate what to do next.
[Related: This magnetic robot arm was inspired by octopus tentacles]
To build the robot, the team created six hollowed-out silicone legs. Inside the legs are fluid-filled bellows (picture the inside of an accordion) and interconnecting tubes arranged into a closed system. The tubes alter the viscosity of the fluid flowing in the system, contorting the shape of the legs; the geometry of the bellows structure allows fluid from the syringe to move in and out in specific ways that adjust the position and pressure inside each leg, making them extend stiffly or deflate into their resting state. Coordinating different, alternating combinations of pressure and position creates a cycled program that makes the legs, and the robot, move.
According to a press release, Yoav Matia, a postdoctoral researcher at Cornell and an author on the study, “developed a full descriptive model that could predict the actuator’s possible motions and anticipate how different input pressures, geometries, and tube and bellow configurations achieve them–all with a single fluid input.”
Because of the flexibility of these rubber joints, the robot is also able to switch its gait, or walking style, depending on the landscape or nature of the obstacles it’s traversing. The researchers say that the technology behind these fluid-based motors and nimble limbs can be applied to a range of other applications, such as 3D-printed machines and robot arms.
