It’s summer, and raspberries are in season. These soft, tartly sweet fruits are delicious but delicate. Most of the time, they have to be harvested by human hands. To help alleviate labor costs and worker shortages, a team at École polytechnique fédérale de Lausanne’s Computational Robot Design & Fabrication Lab (EPFL CREATE) in Switzerland made a robot that knows how to gently support, grasp, and pluck these berries without bruising or squishing them in the process. Their approach is detailed this week in the journal Communications Engineering.
Agriculture, like many other fields that have scaled up dramatically over the last few decades, has become increasingly reliant on complex technology from sensors to robots and more. A growing number of farmers are interested in using robots for more time-intensive tasks such as harvesting strawberries, sweet peppers, apples, lettuce, and tomatoes. But many of these machines are still in an early stage, with the bottleneck factor being the inefficient and costly field trials companies typically have to undergo to fine tune the robot.
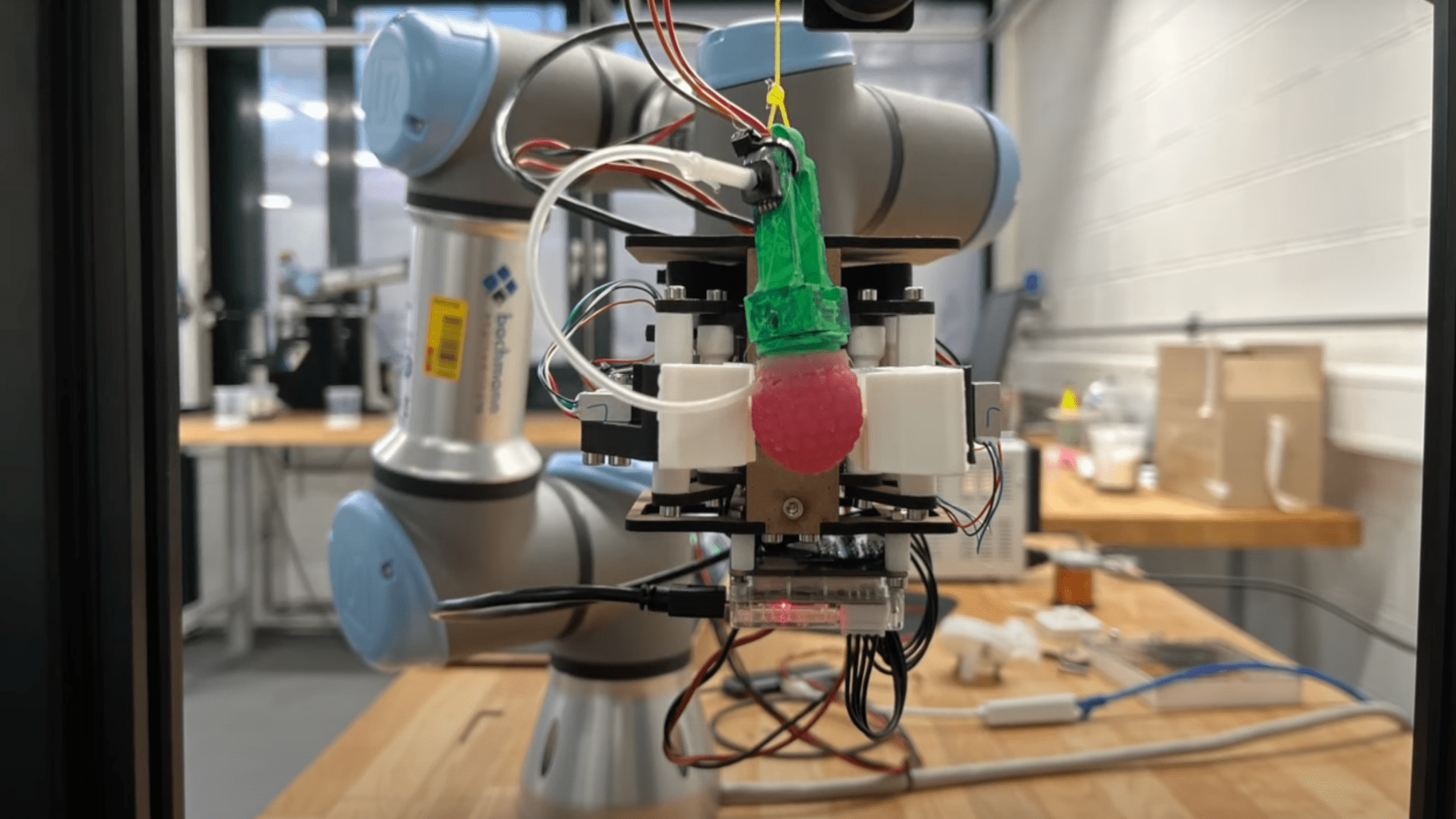
The EPFL team’s solution was to create a fake berry and stem for the robot to learn on. To familiarize robots with picking raspberries, the engineers made a silicone raspberry with an artificial stem that “can ‘tell’ the robot how much pressure is being applied, both while the fruit is still attached to the receptacle and after it’s been released,” according to a press release. The faux raspberry contains sensors that measure compression force and pressure. Two magnets hold the fruit and the stem together.
[Related: This lanternfly-egg-hunting robot could mean fewer bugs to squish]
In a small test with real raspberries, the robot was able to harvest 60 percent of the fruits without damaging them. That’s fairly low compared to the 90 percent from human harvesters on average, signaling to the team that there are still kinks to work out. For example, the robot’s range of reach is not great, and it gets confused when the berries are clustered together.
Making a better fake raspberry could help the robot improve. Moreover, building an extended set that can simulate “environmental conditions such as lighting, temperature, and humidity could further close the Lab2Field reality gap,” the team wrote in the paper.
For now, the next step for the engineers is to modify the controllers and develop a camera system that “will allow robots to not only ‘feel’ raspberries, but also ‘see’ where they’re located and whether they’re ready to be harvested,” Josie Hughes, a professor at EPFL CREATE noted in the press release.
They plan to put their pre-trained robot in a real field this summer to see how well it performs during the height of the local raspberry season in Switzerland. If the tech works as planned, the team wants to look into expanding its fake fruit repertoire to potentially cover berries, tomatoes, apricots or even grapes.
Watch the robot and fake raspberry system at work from a trial run last year:

Soft sensorized physical twin for harvesting raspberries 🍓
