It’s no secret that in our decades of space travel, we haven’t always cleaned up after ourselves. Space debris—like dead satellites, empty rocket fuel containers, and shrapnel from past collisions like the 2009 Russian satellite crash—is gradually building up in the Earth’s orbit. The off-world litter is causing current astronauts real problems, as new missions require careful calculations to keep track of and avoid obstacles. The International Space Station makes adjustments several times a year to avoid disastrous collisions with such space junk.
But no one knows how to pull the trash in and get rid of it. Some debris can be hooked if it has a handle, but much of the trash is made of up smooth surfaces that have no access points. For this reason, Mark Cutkosky of Stanford University said in a Facebook livestream on Wednesday, “It’s kind of an unsolved problem.” But in a paper published this week in Science Robotics, Cutkosky and his colleagues revealed a new type of gripper specifically designed to capture the biggest, most dangerous debris.
Unlike other grippers using pneumatic pumps or adhesives like duct tape, the gripper uses tiles of material inspired by gecko feet. It has tiny microwedges like hairs that are fifteen microns across (ten times smaller than the hairs on your head), and bend when pressed directionally to stick via van der Waals forces. Put on tiles and used in pairs, the material is activated by pulling together on a shared string, and released when raised vertically. In this way the adhesive quality can be turned on and off easily (making it reusable), and is gentle on surfaces like solar panels and spaceship windows.

The paired tiles are then linked together with a system of pulleys to evenly distribute the tension. This makes the gripper more reliable, as the surface-based grip is vulnerable to defects in the surface (such as holes from smaller debris or peeling paint from sun damage). If a variation causes a loss of tension in one pad, the rest will be able to compensate safely. The load-sharing system also allows these grippers to be scaled for many different purposes—from foot-like pads on a climbing robot, to a space shuttle docking stabilizer.

In addition to being reusable and scalable, the grippers are unique in their ability to attach and release without extra motion. The gripper activates by a touch sensor, and automatically grips to objects when it makes contact with them. An astronaut can let go of an object with a release button, and the gripper detaches cleanly without disturbing it. This clean detachment is extremely important under zero gravity conditions, in which the inertia of the objects could cause them to tumble out of control. Researchers designed grippers for flat surfaces and curved cylinders like the one below to get sturdier holds, and release with less uncertainty.
That lack of atmospheric resistance also allows these grippers to be used for huge objects like satellites and spaceships. Unlike on Earth, where grip strength is needed to lift objects, in space you merely have to grasp and manipulate them. That’s why in NASA’s microgravity-simulating “Robodome” (described as “a giant air hockey table”), a single gripper was able to attach to and tow a 850-pound robot.
“The gripper can actually provide the same gripping capability (in terms of Newtons) in space and on Earth,” study author Hao Jiang of Stanford told PopSci in an email. “What’s different is the use. On Earth we are trying to lift things, but in space we are gently accelerating and decelerating things…one of our grippers can lift a wooden box [on Earth], but in floating environment it can grasp and manipulate a car.”
Once they can be handled and moved in a controlled way, the space debris can be either pushed into the atmosphere to safely burn up, or pulled onboard a spaceship to be torn apart and recycled. Researchers hope these robots will be in space collecting non-planetary trash in the next four to five years. Until then, enjoy watching the robots in action:

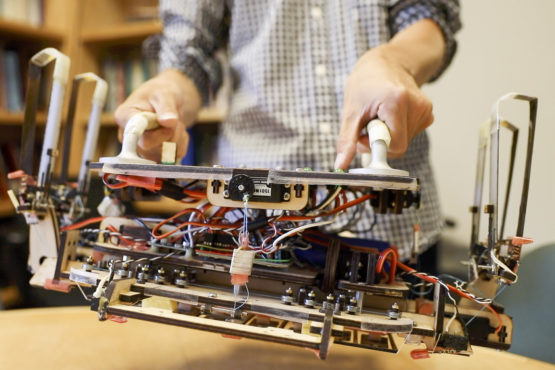
Stanford engineers design a robotic gripper for cleaning up space debris
