
Robots can have trouble grasping the concept of “grasping.” It’s so bad that even a toddler’s motor skills are usually far more developed than some of the most advanced bots. For example, as instinctually easy as it is for a human to pick up an egg, robots usually struggle to compute the intricacies of force and manipulation while also not expending too much energy. To solve this issue, researchers at the University of Cambridge recently found a novel solution by streamlining what a robot hand could do.
As detailed in a paper published with Advanced Intelligent Systems, the team has developed a low-cost robotic hand capable of passively grasping and holding various objects via sensors embedded in its “skin.” What’s more, no finger articulation is needed to accomplish its tasks, thus drastically simplifying its design, programming, and energy needs.
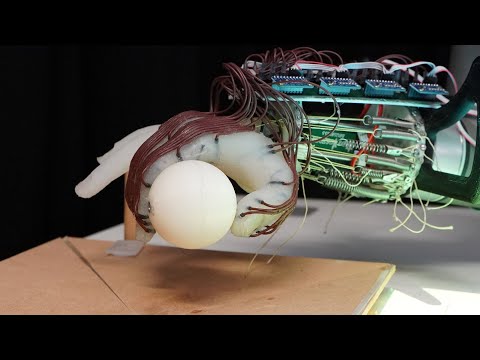
Robot hand learns how not to drop the ball
“We want to simplify the hand as much as possible,” Fumiya Iida, a professor in the university’s Bio-Inspired Robotics Laboratory and one of the paper’s co-authors, said in a statement. “We can get lots of good information and a high degree of control without any actuators, so that when we do add them, we’ll get more complex behavior in a more efficient package.”
To pull it off, researchers first implanted tactile sensors within a soft, 3D-printed, anthropomorphic hand that only moved via its wrist. The team then performed over 1,200 tests to study its grasping and holding abilities. Many of these tests focused on picking up small, 3D-printed plastic balls by mimicking pre-determined movements demonstrated by humans. After the plastic balls, the hand graduated to attempting to pick up bubble wrap, a computer mouse, and even a peach. According to their results, the hand successfully managed 11 of the 14 additional test objects.
[Related: Human brains have to work overtime to beat robots at Ping-Pong.]
According to first author Kieran Gilday, the team’s robot appendage learns over time that certain combinations of wrist motion and sensor data leads to success or failure, and adjusts as needed. “The hand is very simple, but it can pick up a lot of objects with the same strategy,” they said in the statement.
While by no means perfect, the simplified robotic hand could prove useful in a variety of environments and industries, such as manufacturing. Moving forward, researchers hope to potentially expand the robot hand’s capabilities through combining it with computer vision and teaching it “to exploit its environment” to utilize a wider array of objects.
