Robotics engineers are one step closer to building a swarm of krill bots capable of underwater exploration, as well as perhaps one day aiding in future search and rescue missions. According to a study published earlier this month in Scientific Reports, a team at Brown University working alongside researchers at the Universidad Nacional Autónoma de México recently designed and built a robotic platform dubbed the Pleobot. It’s a “unique krill-inspired robotic swimming appendage” researchers say is the first mechanism allowing for a comprehensive study of what’s known as metachronal propulsion.
While the whole assembly of the robot is about nine inches long, it’s based on krill, a tiny, paperclip-sized biological organism. Despite their small size, krill regularly travel comparatively massive distances—vertically migrating over 3,200 feet twice a day. One key to these daily journeys is their metachronal swimming—a form of movement often found in multi-legged aquatic creatures including shrimp and copepods in which their limbs undulate in wavelike patterns to propel them through their watery abodes.
[Related: When krill host social gatherings, other ocean animals thrive.]
For years, studying the intricacies of metachronal propulsion has been limited to the observation of live organisms. In a statement published on Monday, however, paper lead author Sara Oliveira Santos explained the Pleobot allows for “unparalleled resolution and control” to examine krill-like swimming, including studying how metachronal propulsion allows the creatures to “excel at maneuvering underwater.”
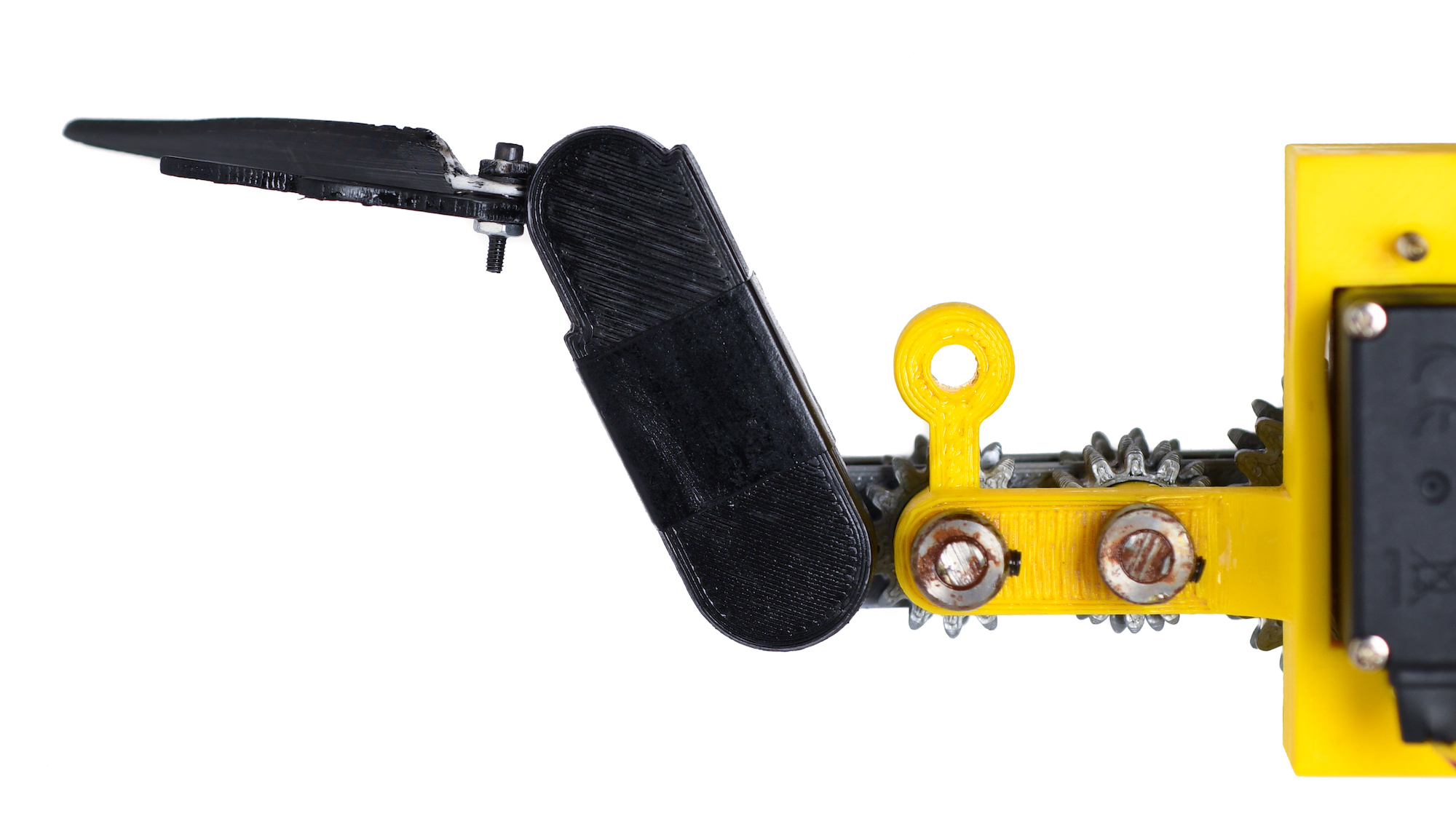
The Pleobot is constructed mainly from 3D printed parts assembled into three articulated sections. Researchers can actively control the first two portions of the krill-like leg, while the biramous (two-branched) end fins move passively against the water.
“We have snapshots of the mechanisms they use to swim efficiently, but we do not have comprehensive data,” said postdoctoral associate Nils Tack. “We built and programmed a robot that precisely emulates the essential movements of the legs to produce specific motions and change the shape of the appendages. This allows us to study different configurations to take measurements and make comparisons that are otherwise unobtainable with live animals.”
[Related: In constant darkness, Arctic krill migrate by twilight and the Northern Lights.]
According to the study, observing the Pleobot even allowed researchers to determine a previously unknown factor of krill movement—how they generate lift while swimming forward. As the team explained, krill must constantly swim to avoid sinking, which means at least some lift must be produced while moving horizontally within water. As Yunxing Su, another postdoctoral associate involved in the project, explained, “We identified an important effect of a low-pressure region at the back side of the swimming legs that contributes to the lift force enhancement during the power stroke of the moving legs.”
Moving forward, the team hopes to further expand their understanding of agile krill-like swimming and apply it to future Pleobot iterations. After honing this design—which the team has made open-source online—the krill leg mechanisms eventually could find their way onto underwater robots for all sorts of uses, including exploration and even rescue missions.
Take a look at how it moves, below:

Pleobot krill-inspired robotic platform
Correction: An earlier version of this article stated that the Pleobot is about a foot in size. This has been updated for accuracy.
