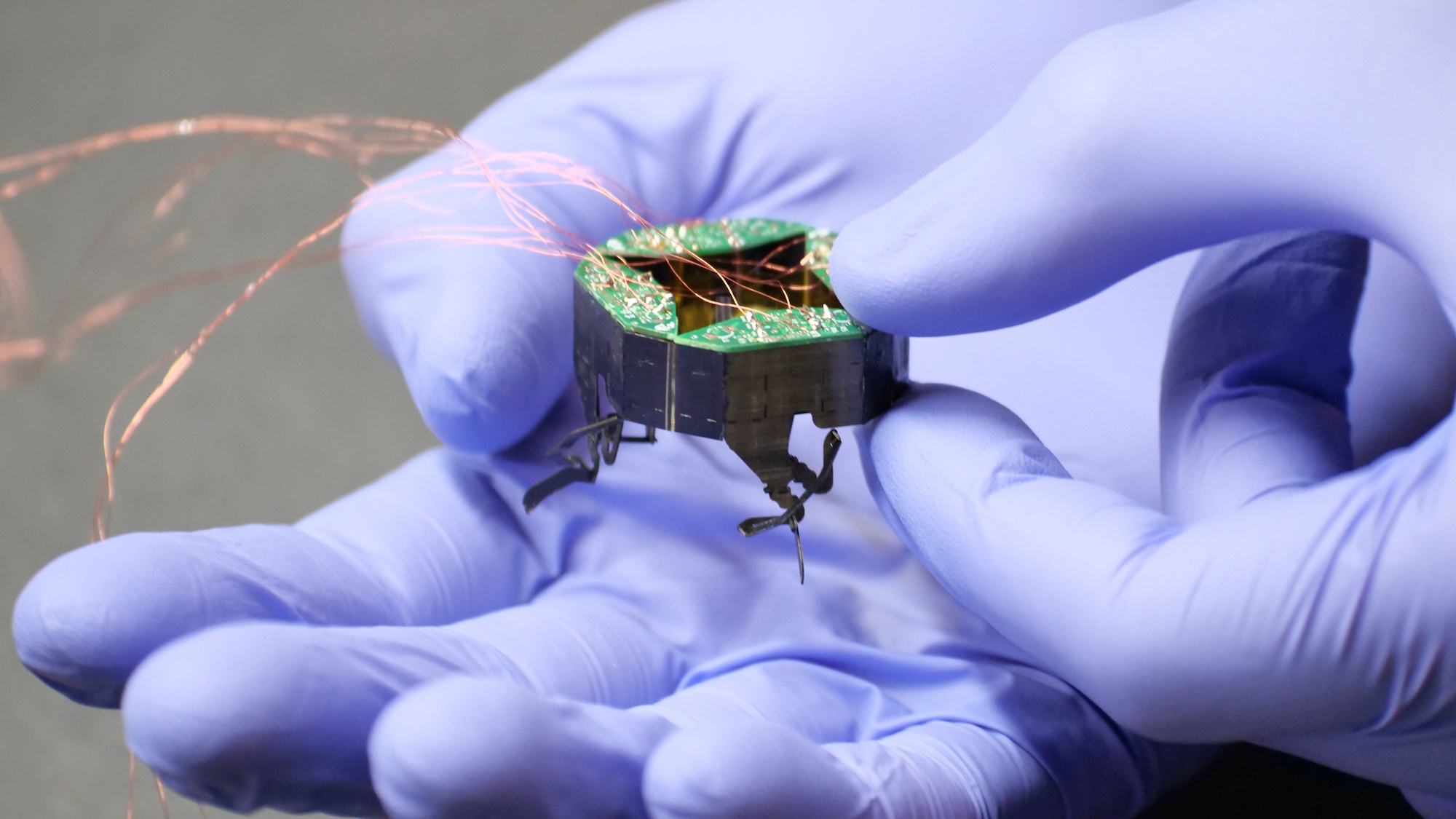
A multi-legged robot inspired by everyday bugs could soon come to your aid in a literal and figurative pinch. In a new study published via Advanced Intelligent Systems, University of Colorado Boulder researchers recently unveiled their Compliant Legged Articulated Robotic Insect, aka CLARI. The cute, modular bot is lighter than a ping pong ball and small enough that multiple units can fit in your hand. But don’t let its size and weight fool you—CLARI is optimized to squeeze into tight spaces via an extremely malleable body structure. The bug-like bot shows immense promise as an exploratory tool for small areas such as within jet engines, as well as even during search and rescue missions.
[Related: This bumblebee-inspired bot can bounce back after injuring a wing.]
According to assistant professor of mechanical engineering and study co-author Kaushik Jayaram, CLARI’s inspiration is owed largely to the everyday cockroach. As a graduate student, Jayaram engineered a robot capable of compressing to just half its height, much like roaches fitting through tiny crevices in buildings.
“We were able to squeeze through vertical gaps, but that got me thinking: That’s one way to compress. What are others?” said Jayaram in an August 30 statement.
Fast forward a few years to CLARI, a new iteration that builds upon previous soft robotic advancements. In its standard shape, CLARI resembles a square with four articulating legs, each controlled by its own dual actuators and circuitry. When encountering a difficult environment, however, the team’s robot can narrow from 1.3 inches wide to just 0.8 inches narrow. With more refinement, Jayaram’s team believes future CLARI robots could become even more malleable.

CLARI: The incredible, squishable robot
“What we want are general-purpose robots that can change shape and adapt to whatever the environmental conditions are,” Jayarm said. He likens the ultimate version to an amoeba “which has no well-defined shape but can change depending on whether it needs to move fast or engulf some food.”
Instead of dining opportunities, however, CLARI bots could use their unique structures and various leg configurations to traverse disaster zones in search of missing victims, or inspect the innards of machinery without needing to take apart the entire product. Right now, CLARI still requires wired connections for both power and controls, but Jayaram’s team hopes to eventually create wireless models capable of independent movement and exploration.
“Most robots today basically look like a cube,” Jayaram said. “Why should they all be the same? Animals come in all shapes and sizes.”
