If all goes according to plan, a tennis ball-sized robot modeled after a children’s toy will soon briefly explore the moon’s surface as part of Japan’s first soft lunar landing. As recently highlighted by Space.com, the Japanese space agency, JAXA, is currently overseeing its Smart Lander for Investigating Moon (SLIM) probe mission, which launched on September 6 alongside the country’s XRISM X-ray satellite payload. Unlike more powerful launches, it will take less than 9-foot-wide SLIM between three and four months to reach lunar orbit, after which it will survey the roughly 1000-foot-wide Shioli Crater landing site from afar for about another month.
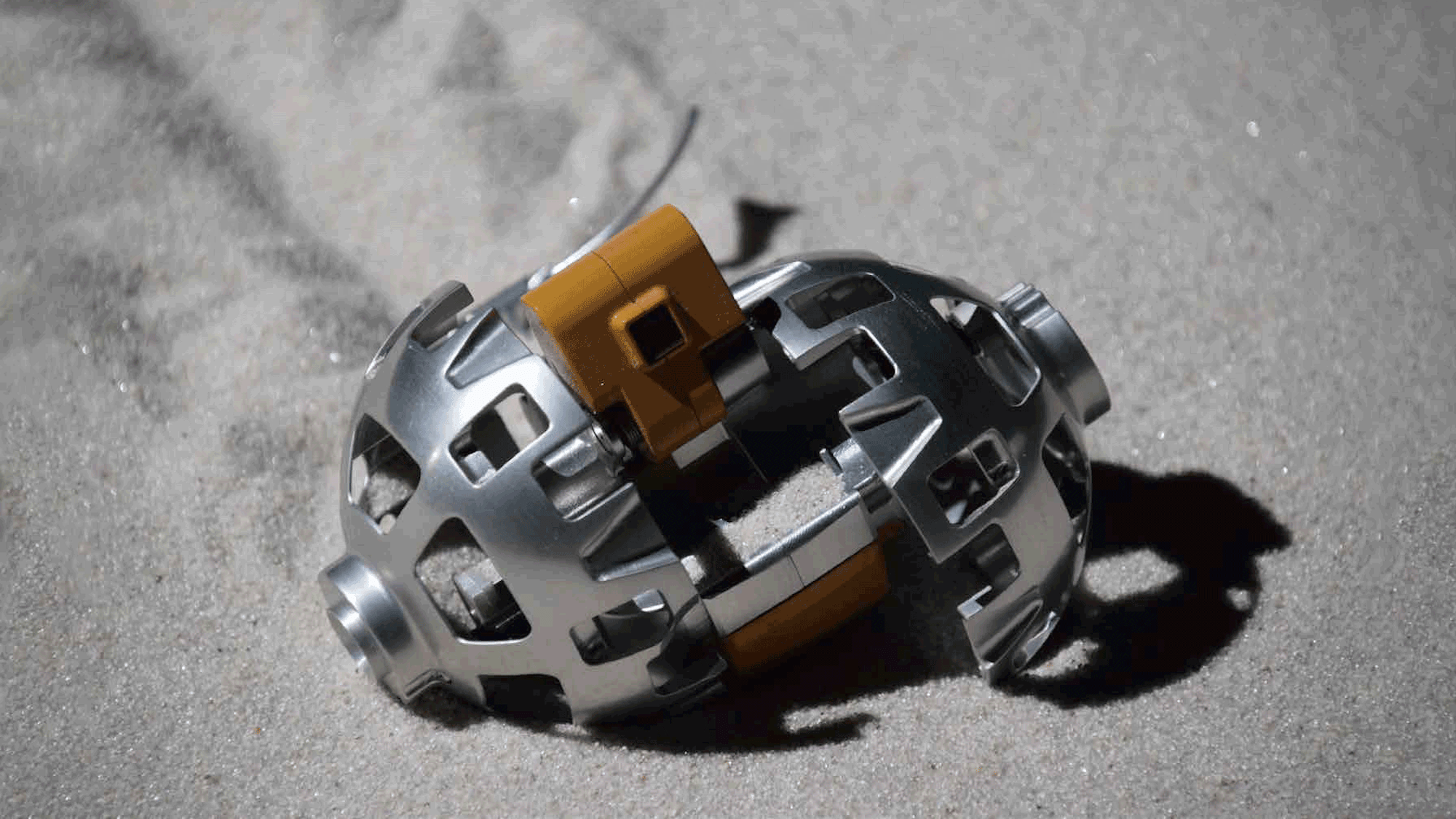
Afterwards, however, the lander will descend towards the moon, and deploy the Lunar Excursion Vehicle 2 (LEV-2) once it reaches around six-feet above the surface. The probe’s sphere-shaped casing will then divide into two halves on either side of a small camera system. From there, LEV-2 will begin hobbling atop the SLIM landing site and surrounding area for around two hours, until its battery reserve is depleted.
[Related: India’s successful moon landing makes lunar history.]
Per JAXA’s description, LEV-2 was developed by its Space Exploration Innovation Hub Center associate senior researcher Hirano Daichi. Daichi collaborated with a team from Doshisha University as well as the toy manufacturer TOMY to create the tiny space explorer. Meanwhile, Sony provided the two cameras that will survey the moon. According to Daichi, the team turned to children’s toys for their “robust and safe design… which reduced the number of components used in the vehicle as much as possible and increased its reliability.”
“This robot was developed successfully within the limited size and mass using the downsizing and weight reduction technologies and the shape changing mechanism developed for toys by TOMY,” continued Daichi.
SORA-Q Flagship Model で月面探査を体験しよう!
If successful, JAXA engineers hope the soft lunar landing method can be adapted to larger craft in the future, including those piloted by human astronauts. “By creating the SLIM lander humans will make a qualitative shift towards being able to land where we want and not just where it is easy to land, as had been the case before,” reads JAXA’s project description. “By achieving this, it will become possible to land on planets even more resource scarce than the moon.”
Beyond just this project, it’s been an active time for lunar exploration. In August, India completed the first successful lunar landing at the moon’s south pole via its Chandrayaan-3 probe. Last year, NASA’s Artemis-1 rocket also kickstarted the space agency’s long standing goal towards establishing a permanent moon base.
