Robotic engineers are no stranger to turning to nature for inspiration. In recent years, birds, dogs, extinct sea creatures, and even humans themselves have all served as jumping off point for new mechanical designs. Now, researchers from Stanford are citing the Harvestman spider, better known as a daddy long-legs as inspiration for a new robot design they believe could be better equipped at navigating uneven rocky caverns and lava tubes. One day, they hope this spider-like design could even help robots navigate the icy caverns of the moon and Mars.
How does the spider robot work?
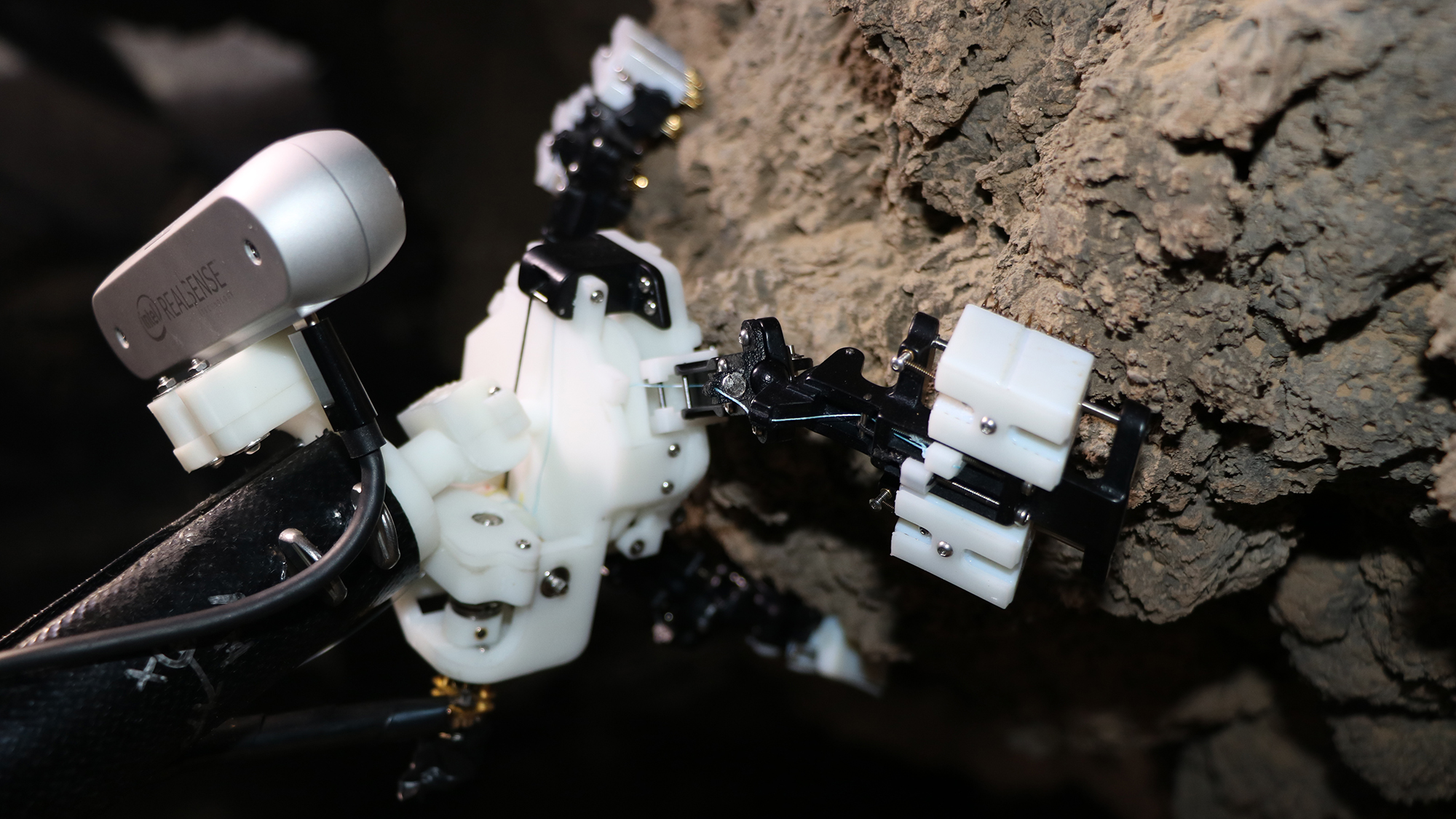
The researchers introduced their new machine called the “ReachBot” in a paper published today in the journal Science Robotics. ReachBot features multiple extendable boom limbs which it can use to reach out for rocks and propel itself forward. Each limb comes attached with a three finger gripper that grabs onto the rocks and uses them as anchor points. The long-legged design means the robot’s limbs can potentially access the floor, ceiling, and walls of a lava tube or cave, which in turn provide increased leverage. This unique positioning, the researchers write, lets the ReachBot “assume a wide variety of possible configurations, bracing stances, and force application options.”

ReachBot attempts to fill in a form-factor gap among existing exploration robots. Small robots, the researchers argue, are useful for navigating through tight corridors but typically have limited reach. Larger robots, by contrast, might be able to reach more area but can get bogged down by their heft mass and mechanical complexity. ReachBot offers a compromise by relying on a small main body with limbs that can expand and reach out if necessary.
The robot utilizes a set of onboard sensors to scale the area ahead of it and look for concave rocks or other signs suggestive of a graspable area. Like a physical spider. ReachBot doesn’t immediately assume rock surfaces are flat, but instead seeks “rounded features that the gripper can partially enclose.” Researchers say they tested the robot in simulation to help it improve its ability to correctly identify grippable surface areas and aid in footstep planning. Following the simulation, ReachBot was tested in the real-world in an unmanned lava tube near Pisgah crater in Mojave Desert.
“Results from the field test confirm the predictions of maximum grasp forces and underscore the importance of identifying and steering toward convex rock features that provide a strong grip,” the researchers write. “They also highlight a characteristic of grasp planning with ReachBot, which is that identifying, aiming for, and extending booms involves a higher level of commitment than grasping objects in manufacturing scenarios.”
ReachBot could help researchers explore deep caves and caverns on other planets
Researchers believe ReachBot’s arachnid design could have extraterrestrial applications. Lava tubes like in the Mojave Desert where the robot was tested removes some of the area on the surface of the moon and Mars. In the latter example, researchers say ancient subsurface environments on the Red Planet remain relatively unchanged the time when some believe the planet may have been habitable. These sheltered cavern areas, they write, “could provide sites for future human habitation.”
In theory, future exploratory space robots could use a design like ReachBot’s to explore deeper into areas contemporary robots could find inaccessible. Elsewhere, researchers are exploring how three-legged jumping machines and four-legged, dog inspired robots could similarly help scientists learn more about undiscovered areas of our solar system neighbors.
