
Four-legged robots like Boston Dynamics’ Spot and Cheetah owe almost all their agility to fancy footwork. While they may visually move much like their mammalian counterparts, the anatomical inspirations largely stop at their legs. In biology, however, a quadrupedal animal’s movement, flexibility, and intricate motor functions stem almost entirely from its spine. Replicating that complex system of stacked vertebrae in robots is much more difficult than the legs—but if artificial spines could be integrated into such designs, engineers could open up entirely new avenues of precise maneuverability.
[Related: A new tail accessory propels this robot dog across streams.]
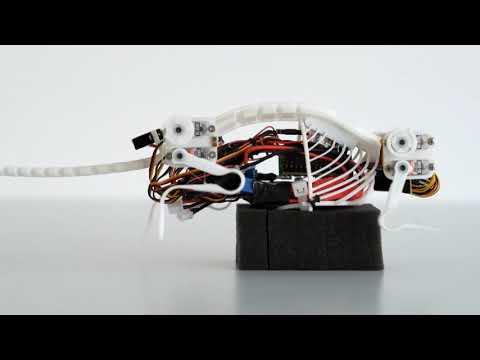
Now, engineers are reportedly a few steps further towards spine-centric quadruped bots thanks to a research team’s very uncanny, rodent-inspired robot. Writing in Science Robotics on Wednesday, collaborators across Germany and China have unveiled NeRmo, a biomimetic, four-legged robot that relies on a novel motor-tendon framework to scurry its way around environments.
As far as looks go, NeRmo mirrors a mouse’s skeletal system—although the ears, although cute, are likely superfluous. The robot’s rigid front half houses its electronics systems, while its latter half functions much as an actual flexible spine would, with four lumbar and lateral joints. Artificial tendons thread through the spine as well as the robot’s elbow and knee joints allow NeRmo even more mouselike movements alongside quicker turning times.
NeRmo Mouse Robot Introduction
According to collaborators at the Technical University of Munich, University of Technology Nuremberg, and China’s Sun Yat-Sen University, NeRmo’s tendon-pulley system precludes the need for any musculature while still allowing for smooth flexion capabilities across the lateral and sagittal planes, i.e. side-to-side, and up-and-down.
To test their new design, the team ran NeRmo through a series of four experiments to demonstrate static balancing, straight-line walking, agile turning, and maze navigation. Each trial included two rounds—one with the spinal system engaged, and another with it disabled. Across the board, NeRmo performed their tasks better, faster, and more accurately when it integrated the spine into its movements.
Maze navigation, however, was NeRmo’s true shining moment. With its spine engaged, the mouse-bot completed its labyrinth runs an average of 30 percent faster than simply waddling through without spinal support.
Although still in its early stages, researchers believe further design tweaking and integration of the spinal systems into future quadruped robots could vastly improve their functionality. If NeRmo wasn’t proof enough, think of it this way—MIT’s Cheetah can gallop at 13 feet-per-second with just one actuated joint mimicking spinal flexion in the sagittal plane. NeRmo, meanwhile, has eight joints.
