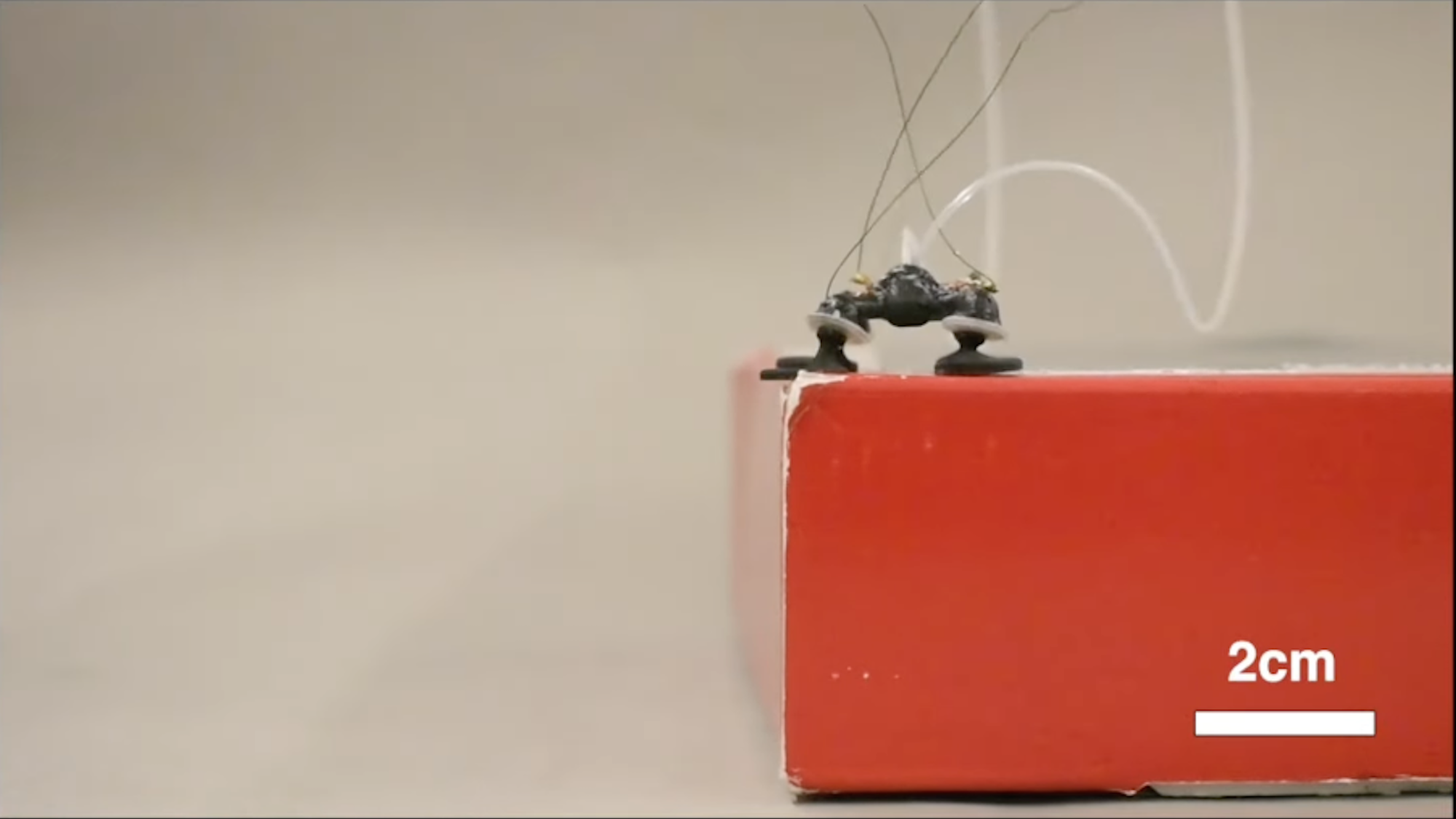
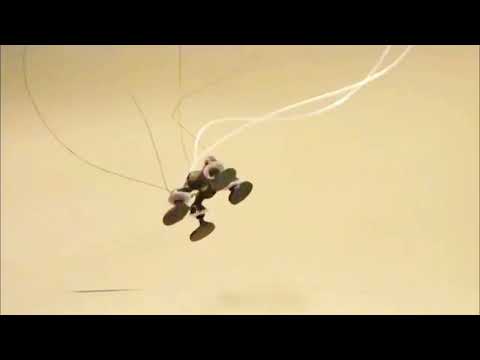
Electrical power and battery arrays remain go-to routes for juicing up robots, but sometimes old school explosives can still do the trick. A team at Cornell University recently demonstrated just that idea via a new tiny robot that relies on small-scale actuators ostensibly fueled by miniature internal-combustion engines. Even at minuscule levels, the bug-sized quadrupedal bot’s design allows it to launch to heights nearly as high as many leaping insects, while also carrying and walking with a load 22 times its own weight.
As detailed in a paper published on September 14 in Science, researchers created a propulsion unit via assembling a 3D-printed combustion chamber with an inflatable elastomeric membrane, electrodes, as well as teeny fuel injection tubing. When the electrodes introduce a small spark, the membrane balloons in just half a millisecond with 9.5 newtons of force. The process can then be repeated as quickly as 100 times per second.
“The high frequencies, speeds, and strengths allow [the] actuators to provide microrobots with locomotion capabilities that were previously available only to much larger robots,” writes Northwestern University Assistant Professor of Materials Science and Engineering Ryan Truby in a related essay within Science.
[Related: This small, squishy robot is cuter than its cockroach inspiration.]
But as IEEE Spectrum explains, even the smallest explosions can wear down or damage materials over time. Knowing this, the engineering team designed the elastic membrane using flame-resistant material alongside an integrated flame arrestor to control the timing and size of each little kaboom. The results are an extremely durable propulsion unit that the team estimates can continuously operate for over 750,000 cycles (roughly 8.5 hours for the robot) before any noticeable performance degradation. In video demonstrations, the team showcased their 29 mm long, 1.5 g robot vertically leaping 59 centimeters, even while carrying comparably massive amounts of weight. To “walk,” the robot fires its actuators at breakneck speed, and turns via selectively engaging the same engines.
Combustion Powered Soft Walking Robot
Moving forward (so to speak), the team wants to hone their bot’s ability to actually slow its actuators to allow for more precise movement, as well as the ability to “run.” The robot is also currently tethered via power cables, so creating wireless iterations would be integral to deploying the device in a real-world scenario, such as a disaster zone or other hard-to-reach environments.
“One idea we want to explore in the future is using aggregates of these small and powerful actuators as large, variable recruitment musculature in large robots,” Robert F. Shepherd, head of Cornell’s Organic Robotics Lab and study co-author, told IEEE Spectrum. “Putting thousands of these actuators in bundles over a rigid endoskeleton could allow for dexterous and fast land-based hybrid robots.”
Explosive robot muscles—what could go wrong?
