Rough Sketch: “This Squishy Arm is Cheap–Good For Search and Rescue”
Our 14-inch-long robotic elephant trunk has five segments, each made of a silicone membrane with an embedded metal spring that...
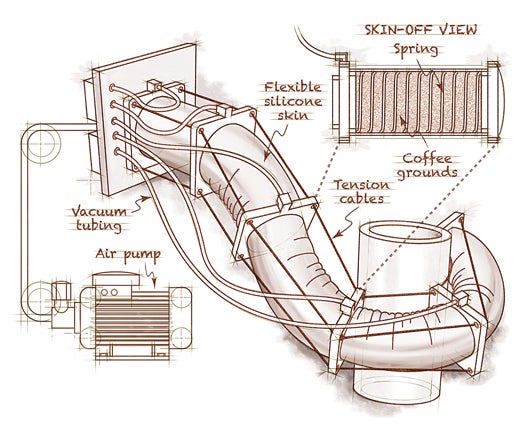
Our 14-inch-long robotic elephant trunk has five segments, each made of a silicone membrane with an embedded metal spring that acts like an exoskeleton. The segments are filled with dry coffee grounds and each is vacuum-controlled separately. When coffee grounds are loosely packed, they’re in a liquid-like state. When they’re vacuum-packed, they transition into a solid-like state.
Three fishing-line tension cables run down the length of the trunk. To move a segment while the coffee is loose, first we change the length of the cables; software tells motorized spools how much to pull each line to produce the curvature we want.
Then, to lock a segment in place, we suck the air out of it, jamming the coffee into solid form. Since we can move an individual segment by locking the other ones, we can make the robot twist and take on complicated geometries using only three motors total. Usually you’d need three motors at each joint to get the degrees of freedom we get.
We tested more than 20 different grains, but coarse-ground coffee jams particularly well. The grounds are jagged, so the grains don’t slip past each other. Also, smaller grains can fill voids between larger grains, constraining motion even more.
The trunk can grab things and hold twice its weight. Because the parts are so cheap, the robot is more disposable than most, which could be good for search and rescue. Another application might be for humanoid or industrial robots that work around people. These machines can be dangerous because they are rigid and have hinges that can pinch people. That’s not a problem with the trunk.
—Nadia Cheng is a doctoral student in mechanical engineering at MIT