It’s entirely possible that the DARPA Robotics Challenge (DRC) will be a complete mess. The goal of this two-year Pentagon-funded competition is beyond ambitious—to develop robotic first responders, able to operate in Fukushima-like situations, human-centric environments that have become disaster zones too lethal for humans. But so far, the competition has occurred almost entirely out of sight, as teams around the world build and test sophisticated robots in labs, and with simulation software. The first competitive event in the DRC, a simulator-only event called the Virtual Robotics Challenge, played out this past summer with little fanfare or attention. The VRC was a qualifier, of sorts, to determine which teams would be able to use one of seven Atlas robots (built by Boston Dynamics and paid for by DARPA). On December 20th and 21st the DRC will begin in earnest, with the physical trials being held at the Homestead-Miami Speedway in Florida.
Again, it could be a disaster. As more than a dozen robots make their mostly autonomous way across an obstacle course, attempting a series of eight tasks that range from the merely challenging (traversing rough terrain) to the potentially ridiculous (driving a Polaris utility vehicle), failure isn’t an option—it’s an inevitability. Motors will fail, actuators will break, and control algorithms will send machines lurching off-target or off-mission.
It’s the potential for disaster that makes the DRC so exciting. Will anyone complete all eight tasks? Will the competition end in wreckage? And even if this week’s trials are nothing but synthetic slapstick, redemption is just a year away—the best-performing teams will proceed to the finals in December 2014 and its top prize of $2M, where the tasks will be even harder, and many of the bots will be upgraded.
Before they’re deployed for our amusement, here are the robots of the DRC.
THOR and THOR-OP
Virginia Tech’s game plan, which I covered earlier this year, always involved two robots. THOR (or Tactical Hazardous Operations Robot, pictured on the far left) was Plan A, a high-risk, high-reward machine that more closely mirrored the stability and musculature of human beings than most humanoids. THOR’s series elastic actuators give it a bouncing gait, allowing it to walk efficiently, and recover from stumbles with relative ease. THOR-OP (short for Open Platform), meanwhile, was the backup plan. Smaller and more cautiously Asimo-like in its strides, THOR OP would be a modified version of CHARLI-2, a ground-breaking humanoid that made the cover of Popular Science in 2010, but didn’t seem capable of the ladder-climbing and other feats that DARPA had mentioned as requirements for the physical trials. But this past November, Dennis Hong, director of RoMeLa (Robotics and Mechanics Laboratory) at Virginia Tech, decided that THOR wasn’t competition-ready. THOR-OP was rushed out of understudy status, and Hong now hopes it can score high enough to land his team somewhere in the top eight, guaranteeing government funding in the year leading up to the finals. The DRC’s rules can get complex, but THOR OP isn’t carrying the team’s entire future on its comparatively narrow shoulders—RoMeLa will be able to compete next year, whether it’s funded by DARPA or not. In fact, Hong promises to unleash THOR in the 2014 finals, and to bring the larger robot to this week’s event for a bit of grandstanding. “We’re bringing both robots to Miami,” says Hong. “THOR is going to be walking there, and it will say. ‘I am THOR, I’m going to see you next year!’ ”
THOR
Despite its DRC setback, THOR will rise again—this February, under another name, as a firefighting bot for the Navy. Before DARPA announced its robotics competition, RoMeLa was contracted by the U.S. Navy to build a humanoid robot that could be deployed on a vessel at sea, and fight fires with minimal human intervention (vocal commands, in essence). SAFFiR, or Shipboard Autonomous Firefighting Robot, was slated for a demonstration aboard the decommissioned U.S.S Shadwell this past November, but that event has been pushed back to February 2014.
THOR-OP
While the little-backup-that-could has a shot at completing the majority of the DRC’s tasks, such as opening doors and turning valves, it may pass on others. “We might not be attempting the driving task,” says Hong. Though THOR-OP is smaller than THOR (at least a foot shorter, at 4’ 11”), it’s less flexible, and less suited to a driver’s seat.
CHIMP
Carnegie Mellon University (CMU) has some experience winning DARPA robotics competitions. The university’s Tartan Racing team won the 2007 Urban Challenge with its autonomous Chevy Tahoe. Now, the Tartan Rescue team plans to essentially drive across the finish line again, using an ape-like 400-pound robot with tank treads embedded in its arms and legs. CHIMP (CMU Highly Intelligent Mobile Platform) can stand—it’s 5’ 2” tall when raised up on its “shins”—while performing manipulation tasks. But it moves by rolling, relying on its treads to adjust its orientation or position, and dropping onto all fours to cover longer distances or clear obstacles. What CHIMP is never doing, says Tony Stenz, director of CMU’s National Robotics Engineering Center, is struggling to stay upright, like many two-legged humanoids. “We don’t need to balance,” says Stenz. “We just need to change our shape.”
CHIMP
Like its namesake, CHIMP has disproportionately large arms (compared to most humanoid bots), with a wingspan that measures 10 feet when fully extended. Instead of streaming live video back to the team—which would require more bandwidth and consistent signal strength than DARPA is likely to allow—CHIMP will create what CMU’s Tony Stenz calls “a colorized 3D model of the environment around the robot,” which a remote user can zoom in and out of, and rotate for a clearer perspective, before issuing or modifying commands.
Valkyrie
NASA has two horses in the DRC—Johnson Space Center’s Valkyrie, and Jet Propulsion Lab’s RoboSimian. The former stole the spotlight last week, unveiled in an in-depth IEEE Spectrum story with an equally in-depth video. The 6′ 2″ machine is a humanoid robot ready for its closeup, its enclosed, fabric-draped frame standing in stark contrast to the exposed skeletal bodies of some competitors. Valkyrie’s most interesting feature might be its array of cameras, mounted on its head and torso as well as its feet, knees and arms. JSC’s experience with Robonaut and Robonaut 2, the bot currently being tested aboard the International Space Station, could give it a considerable edge with manipulation tasks. But one team leader doubted whether Valkyrie’s seemingly “rudimentary” mobility would get it close enough to make a difference.
RoboSimian
This bot couldn’t be more different than its fellow NASA-built competitor, Valkyrie. In fact, RoboSimian is the least humanoid robot in the DRC, a scuttling creature that its creators at the Jet Propulsion Laboratory (JPL) describe as “ape-like,” but whose biological equivalent doesn’t really exist. Its four limbs have as many joints, or degrees of freedom, as a primates, but they’re distributed evenly throughout the appendage, creating a kind of segmented tentacle that can fold in upon itself, and manipulate tools at decidedly non-ape-ish angles. Designed for hemispherical symmetry—meaning, essentially, that it has no head or face—RoboSimian has camera mounts positioned around its body, to allow it to instantly change direction without having to rotate. Instead of turning in place to reverse direction, for example, it could simply clamber back where it came from. That’s the ultimate goal, at least, to possibly give the 230-pound bot an advantage during the 2014 finals. For this leg of the competition, RoboSimian’s masters are using a more traditional sensor layout, with six vision cameras facing roughly the same direction. Even so, JPL’s robot will have a unique perspective. “No LIDAR,” says Brett Kennedy, supervisor of the Robotic Vehicles and Manipulators Group at JPL, referring to the laser rangefinders that measure the light bounced off nearby objects. “It’s relying exclusively on visual cameras. And power and packaging are very much what drives that.” The Mars rovers are similarly LIDAR-less, since energy is a premium on distant worlds, the kinds of places that RoboSimian (in some form) might one day visit.
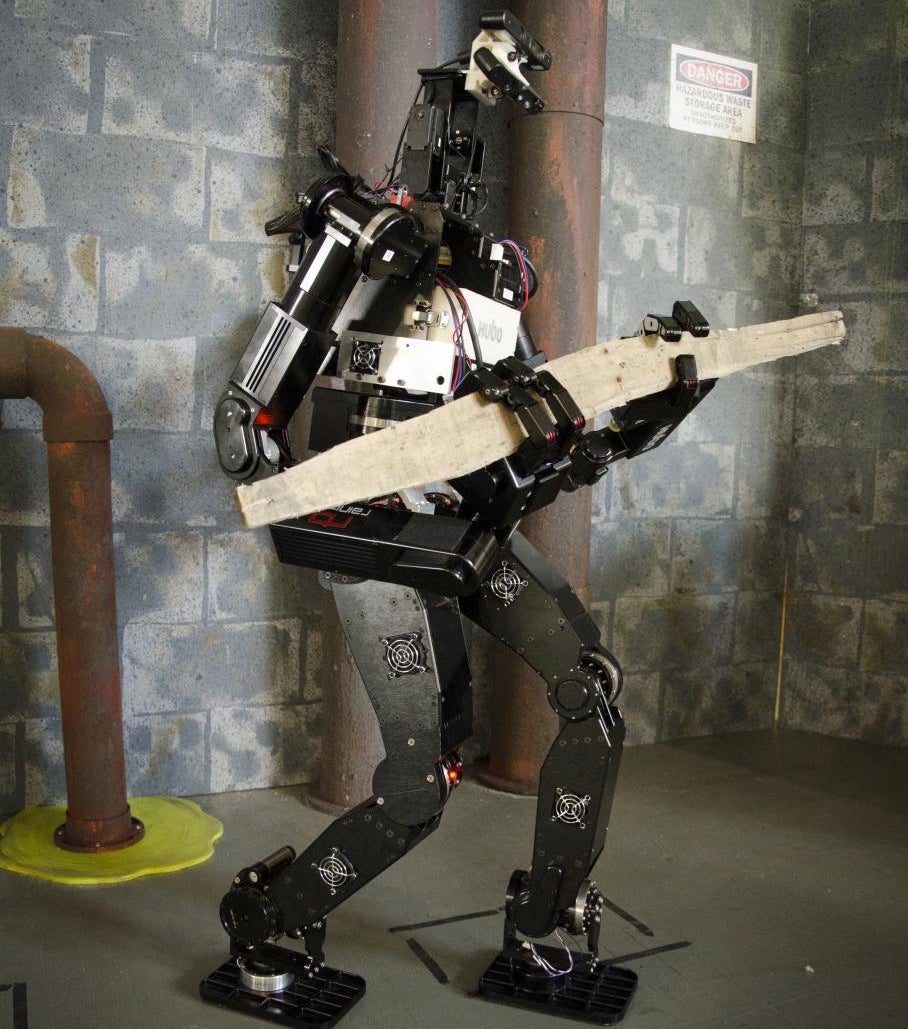
DRC-Hubo
Hubo has been around for years, its child-like proportions and modest bipedal movement recalling that celebrity robot of record, Asimo. “It’s pretty much like a 10 year old boy in size and strength,” says Paul Oh, director of the Drexel Autonomous Systems Lab. “But you’re not going to send a 10 year old boy to do disaster response. For that, you want a 20-something firefighter.” In theory, you want DRC-Hubo, which is roughly a foot taller and 20 percent heavier than its predecessor, but still light enough (at around 130 pounds) to be strapped onto a human’s back and carried as close as possible to the action before marching forth under its power. According to Oh, his team uses the same kind of harness employed by hunters to haul around deer or other game. Surreal as that visual might be, it’s a smart feature, both in terms of the DRC—where loading and unloading a heavy bot could easily wind up damaging it—and prospective real-life use, where battery life could be in short supply. Another potential advantage for team DRC Hubo is its small army of existing robots. The researchers had a total of seven Hubos before the competition was announced, and team members at Drexel as well as Georgia Tech could train and rehearse with those bots while the more powerful variants were being built. The team will bring two identical DRC Hubos to the Miami trials, with plans to split up specific tasks between them. But if either robot breaks down, Oh hopes the other model will be able to load the relevant control algorithms and play on.
DRC-Hubo
To meet manipulation-related challenges, DRC-Hubo employs modified arms, with an additional degree of freedom (compared to previous Hubos). Its head has been transformed, as well. “It is kind of scary, right?” says Drexel’s Paul Oh. “Gone is the pleasing helmet that Hubo had.” Among other things, the bot’s stalk-like head should give it a more elevated view of the course during the utility vehicle driving task.
HRP-2-Based Robot
Arguably the most mysterious robot in the DRC, the model built by Japan-based team Schaft, Inc. doesn’t even have a name. But based on previous demonstrations of the researchers’ robotic systems, including the HRP-2 humanoid that this model is apparently based on, most of the team leaders we spoke to expect Schaft to plow through the mobility-based tasks with relative ease. Water-cooled motors, powered by fast-discharge capacitors (as opposed to standard batteries) should give it enough raw, instantly-accessible power to overcome obstacles. And the University of Tokyo roboticists who are now part of Schaft have shown off their ability to make stable bots, pushing one of their models around the lab on camera (without toppling it). And while it probably has no bearing on the unnamed robot’s performance, it’s worth noting that Schaft Inc. the startup formed to compete in the DRC, was acquired this past year by Google. One of the biggest companies in the world now has a stake in the world’s biggest robotics competition.
Atlas
The previous bots were all built by Track A teams, who are responsible for their own control software, as well as their own hardware (with DARPA providing as much as $4M in funding along the way). The seven Track B participants, on the other hand, are software-only teams, each ne supplied with a relatively shiny, identical humanoid robot: Boston Dynamics’ towering Atlas. Atlas is probably most famous for its foibles—the robot tripped on camera during a demonstration to Japan, crippling itself. During another filmed demo, it stumbled over a two-by-four. Despite being built by the same company that developed the kick-proof BigDog, Atlas didn’t appear to have the ironclad stability that many Track A teams were fearing (Track A, after all, has to compete with the best Track B teams and their Atlases during the physical trials). But after this past weekend, this humanoid could become even more famous, as part of the new, bot-centric face of Google. Boston Dynamics was acquired by Google for an undisclosed sum, and though the robotics firm’s contract with DARPA precedes that deal, the publicity will no doubt draw more attention to the DRC. The last DARPA-funded robot contest was arguably the foundation for Google’s later work on driverless cars. This time around, Google is already present, at an event that could act as a kind of protracted Groundhog Day for humanoid bots. Either they’ll finally reveal themselves as the viable saviors (and servants) we’ve been promised, or they’ll topple and shatter, and the future will be deferred for another year.