Video: Harvard’s Robotic Tentacle Can Lift a Flower Without Crushing It
A soft robotic gripper filled with channels of precisely pressurized air handles delicate objects with a light touch
We’ve written about a few soft robotic tentacles here before, but researchers from Harvard working with the Department of Energy and DARPA have come up with one that they claim is sensitive and nuanced enough to grip and manipulate a flower without breaking it. Their work is detailed in the latest issue of the journal Advanced Materials.
Most robot grippers/manipulators work in a very mechanical fashion. That is, they are generally made of solid materials and controlled by various actuators and joints that allow them to assist in tasks like factory manufacturing. This works well when humans are clear of the robot’s working area and when the materials being manipulated can withstand the abuse imparted by a mechanical gripper that has no real sense of touch or pressure.
The emerging field of soft robotics aims to create systems that are more perceptive and better suited to a diverse physical world around them. This requires manipulators that are more like biological analogs to the human or animal appendage–things that can sense what kind of object they are dealing with and adjust the force of their grip accordingly. This kind of technology will go a long way toward integrating robots into a world populated by a wide variety of biological beings and material objects.
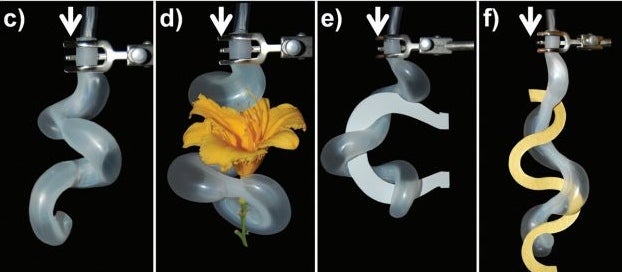
To that end, the Harvard team has developed a single plastic, flexible tentacle filled with several pneumatic channels. These channels can be filled with varying degrees of air pressure that alter the shape of the manipulator. These channels–each independent of the others–not only allow the tentacle to curl in all three dimensions (tentacle manipulators with hard joints can only bend in certain directions) but also enable it to snake around an object, grasp it, and apply just the right amount of force to lift it, whether it’s a coffee mug, a crescent wrench, or a delicate dandelion.
The video below was released some months back and shows the manipulator at a much earlier stage of its development. But you can already see how the independent air channels allow the controller to manipulate this soft tentacle in strange and interesting ways.
