Video: An Undulating, Shape-Shifting Robot that Runs on Compressed Air
Most robots are built rigid and will break under strain–their durability and resilience is more or less dictated by the...
Most robots are built rigid and will break under strain–their durability and resilience is more or less dictated by the amount of stress their material components can withstand before breaking down. But a soft robot–one that lacks a rigid structure–could do all sorts of things, like change its shape and method of movement or survive unique kinds of stresses. And to that end, researchers have built a flexible, pneumatic robot that is exactly that: soft.
Described in an article published in the Proceedings of the National Academy of Sciences, this is a quadrupedal robot that can alter its shape to move across surfaces and squeeze over and around obstacles. Lacking rigid mechanical parts, it can alter its gait and shape to deal with difficult terrain or execute a wide range of movements to negotiate unique obstacles. It does all of this without the cogs, joints, pistons, and motors that drive conventional rigid robots. Rather, it is driven by air.
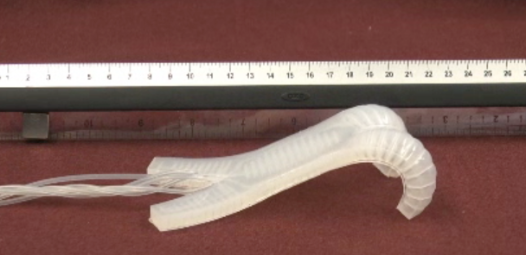
Softbot was inspired by animals like squid and worms that lack the hard skeletons found in mammals, and like those animals it still must become somewhat rigid in order to establish locomotion. Using soft lithography, the researchers fabricated the robot to be actuated by compressed air, allowing each appendage an extremely wide range of independently controlled rigidity and motion. Yet even with this versatile range of motion, the overall design remains simple: a soft-bodied framework, a valving system to channel the air to the proper actuators, and zero electronic sensors.
That makes for a simple robotic system that achieves a wide range of actuation without requiring a lot of mechanical complexity or power. In the video below you can see it crawl, but it can also shimmy through tight spaces or undulate over an obstacle that would likely stymie a tracked or legged rigid robot. More details are available in the full paper, available here.