Bio-Inspired Robots Look to Worms for Better Locomotion Systems
By looking to the neural networks of spiders, crabs, lobsters, and worms, European researchers are building better gait-governing systems for...
By looking to the neural networks of spiders, crabs, lobsters, and worms, European researchers are building better gait-governing systems for robots. Mimicking the rhythmic nerve impulses of some invertebrates can create automatic, repetitive motions that help robots move more naturally and seamlessly, much like the organisms they emulate.
These rhythmic impulses are called central pattern generators (CPGs), and they adapt particularly well to robot motion in part because they are among the best understood neural circuits (invertebrates are pretty simple-minded for the most part, at least as far as neural networks are concerned). These CPGs essentially automate repetitive tasks. Initiate a process (like crawling or walking) with a neural stimulus and the CPGs take over, running the motion like an autopilot computer.
That’s especially helpful when you have a lot of moving parts, like a spider does when walking on all eight legs. Trying to program each leg independently to work with the other seven could be difficult, but CPGs simplify all that. Researchers can design a CPG for each joint, then stitch them together to make a whole-leg CPG, then stitch those together to create a CPG for the whole walking mechanism. That can then be layered with some basic intelligence that can deal with unexpected terrain or events by bringing the robot back into the proper rhythm.
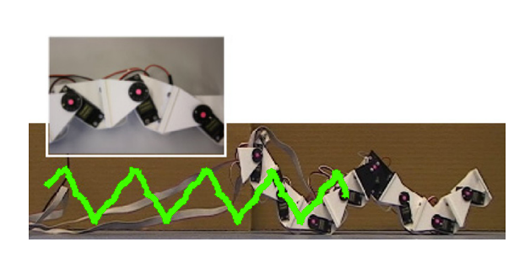
Using this understanding, Spanish researchers have created a robotic worm that mimics the motion of the real thing. The eight-section ‘bot’s CPG was first incubated in a simulator until the researchers got it right, then downloaded to the robot which now wriggles around with ease. The technology could be used to smooth out and simplify the motions of future autonomous robots, giving them more natural gaits.