Video: Scientists Smash a Super-Tough Robotic Hand With a Hammer
Good news everyone! German robotics researchers have built a hyper-strong hand that can withstand hammer blows! Come and shake the...
Good news everyone! German robotics researchers have built a hyper-strong hand that can withstand hammer blows! Come and shake the hand that will someday wring our species’ collective neck.

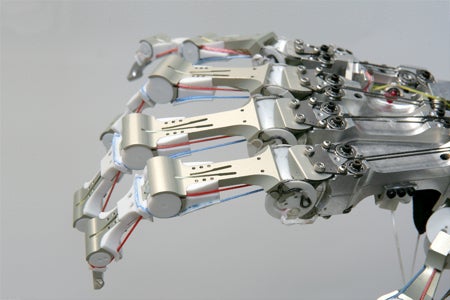
This hand and its high-tech robophalanges come to you courtesy of the Institute of Robotics and Mechatronics at The German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt e.V.). For those of you entertaining visions of robopocalypse, don’t get your hopes up — each of these puppies costs somewhere between €70,000-€10,000, so any would-be Terminators or Cylons would have to hold a lot of bake sales. The DLR hand is one of the most durable robotic hands ever built and was specifically built tough for jobs that might ding it up. As IEEE Spectrum describes:
The hand has the shape and size of a human hand, with five articulated fingers powered by a web of 38 tendons, each connected to an individual motor on the forearm.
The main capability that makes the DLR hand different from other robot hands is that it can control its stiffness. The motors can tension the tendons, allowing the hand to absorb violent shocks. In one test, the researchers hit the hand with a baseball bat-a 66 G impact. The hand survived […]
The hand has a total of 19 degrees of freedom, or only one less than the real thing, and it can move the fingers independently to grasp varied objects. The fingers can exert a force of up to 30 newtons at the fingertips, which makes this hand also one of the strongest ever built.
Additionally, the hand can catch heavy balls, adjust its level of stiffness to accomplish tasks that require a daintier touch, and snap its fingers. That’s right, we’re looking at the next star of the future’s all-robot revue of West Side Story.

io9 is a website about the future, exploring the science and science fiction that will take us there.