MIT Drones Dance Their Way Around Obstacles
Looking at the open spaces
Drones are stupid. This isn’t a subjective judgement; without the hands of a canny pilot, most flying quadcopters or remotely controlled planes will crash into obstacles in their path, like the world’s largest, clumsiest insects. That’s fine for casual flight in open fields, but if drones are ever to navigate dense obstacles like forests or the insides of buildings, they need to be a lot smarter. Thanks to a project by MIT’s Computer Science And Artificial Intelligence Laboratory (CSAIL), drones can now navigate dense obstacle courses without crashing. It works for quadcopters:
And fixed-wing airplanes too:
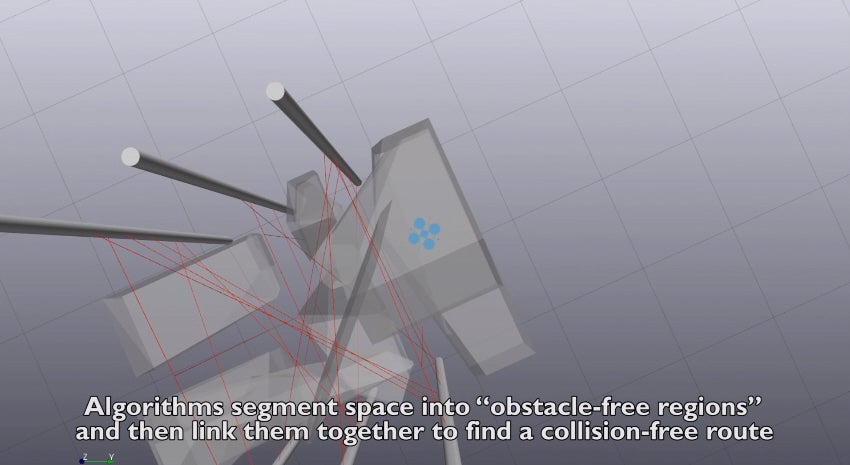
Here’s how it works. An algorithm (made by CSAIL and available on Github] plots the open spaces the drone needs to fly through. This is based on work CSAIL did for ATLAS, their walking robot entrant into DARPA’s Great Robotics Challenge. Here’s how MIT describes it:
That’s great for quadcopters, which move calmly through space, but doesn’t quite work for the fast-flying planes. Instead, they created a separate tool to guide fixed-wing drones. Again, from CSAIL:
As drones move away from simple remote-controlled toys and become more autonomous flying tools, programs like these will keep them flying safely through unfamiliar terrain.
Watch quadcopters navigate obstacles below:

