The Army’s New Robotic Tentacle Manipulator Uses Teams of Snakebots to Manipulate Objects
Snake-like robots are nothing new — for instance, Virginia Tech has developed some pretty amazing pole-climbing snakebots, and the Israeli...
Snake-like robots are nothing new — for instance, Virginia Tech has developed some pretty amazing pole-climbing snakebots, and the Israeli military has a weaponized recon ‘bot in the works — but the U.S. Army Research Lab is taking military snakebots to a new level. Its Robotic Tentacle Manipulator is using snakebot tech to develop a scalable system in which several robots work in unison to manipulate objects.
Like many of its counterparts, the individual RTM snake can slither into tight spaces, climb impassible obstacles, or swim where soldiers cannot, all the while beaming back images to the soldier controlling it by remote. Each snake is equipped with a sensor array, not least of which is a LIDAR scanner that lets it render 3-D depictions of objects, landscapes, or faces.
But the snakes also work in groups, acting more like fingers or the tentacles of an octopus. Arranging several of them on a circular base creates an array that can gingerly pick up, rotate, and inspect an IED or possibly even open a door — a seemingly simple task that falls outside the capabilities of most robotic platforms. Its touch sensitivity allows it to do delicate work — you don’t want to squeeze a live munition, for instance — yet in tandem the snakes could be reasonably strong.
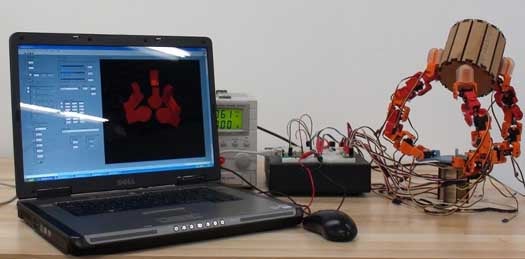
The developmental hardware that the RTM program is currently working with spun out of research into snakebots conducted in collaboration with Carnegie Mellon’s Robotics Institute and consists of three 9.5-inch tentacles and a large screen laptop for the operator. The master program runs advanced algorithms that are able to manipulate the motors in each link of the snakes to work in concert as though they belong to single organism. But the system is completely scalable, so a small custom array could be designed to give the Army’s Warrior robot system a more dexterous “hand,” while larger tentacle arrays could be fitted to larger vehicles or robots.