Make Your Own Remote-Control Spy Blimp
Float on!
I’m a materials-science engineer at an agency that allocates funding to research projects. It’s theoretical work, so in my spare time I like to do practical, hands-on things. I’ve been building R/C models for 33 years and have always preferred uncommon vehicles–amphibious cars, submarines, hovercrafts–so indoor R/C airships are a good fit for me.
I built my first airship about 12 years ago, when relatively light R/C gear began to be more affordable. My newest toy is a helium-balloon blimp equipped with a miniature video camera. The craft is too conspicuous to do real surveillance, but it’s lots of fun to fly and take aerial shots. It’s also smaller than almost any off-the-shelf model and has a better combination of stability and maneuverability.
Here’s a full list of instructions:
STEP 1: REQUIRED R/C GEAR
- Three ultra micro servos at around 2.5g or less: I used the ones branded Blue Arrow. These allow for an easy fit of the propellers (motor shaft of 0.7 mm).
- An ultra micro receiver: I used DelTang Rx33. In any case, chose one below 2g and working on a single LiPo cell (commonly referred to as 1s). Actually many receivers do work on 1s, even if not documented as such. Make sure your servos’ and receiver’s connectors are compatible, or you’re in for some soldering after all. Both the DelTang DSM2 receivers and the blue arrow servos come in a number of connector versions. Specialised online shops like Micron Radio Control. Plantraco or Aether Sciences RC can help in this.
- Obviously you will need a compatible transmitter. The simplest one with 3 or more channels will suffice.
- A 70 to 140 mAh 1s LiPo battery (and a suitable charger): The smallest batteries (around 2.5 g for a 70 mAh) are needed to keep the weight under 10g. A larger battery obviously gives you a longer flight time, but even as flight time is very dependent on flying style, it is easily half an hour with a 125 mAh (weighing 3.5g). A smaller battery will still easily last 15 min or more and it will make a latex balloon last longer (making room for more ballast to compensate for lost helium).
- Leads to connect your battery to your receiver (again the specialist RC shop can help in this).
- Three small propellers: I used the Plantraco 32 mm “butterfly” propellers . These are some amazing high performance tiny propellers that fit a 0.7mm shaft. The “AESH34 – Hélice Micro” from Aether Sciences RC looks very suitable too.
- A 1 mm carbon rod, about 30 cm long
- A piece of Depron, about 10 cm by 10 cm, 1 mm thick (if not available 3mm thick Depron can be used too). Some putty as ballast.
- Finally, you will need some cellophane tape (sellotape, scotch tape), a pair of small pliers, a couple of small elastic band, superglue and a pair of scissors. A scale, accurate to 0.1g or better, comes in handy. Soldering is optional.
If you already have a transmitter and a charger for the flight battery, the materials needed will cost up to 80 EUR (about $100 USD). If you source your servos and propellers cheap you can bring this down significantly. If on top of that you go for a slightly larger version with a 2g receiver, you can you bring it down to under 30 EUR.
A suitable transmitter and charger shouldn’t set you back more than 50 EUR. That is slightly more than the complete Plantraco NanoBlimp, but then we are talking of a DSM2 system, with far more than 4 frequencies available.

Choosing the Balloon
STEP 2: DETERMINING WEIGHT, CHOOSING BALLOON
You can buy your balloon and/or have it filled with helium at any balloon shop or bring a one-way helium canister home.
I first determined the weight of all parts and added an estimate for the fin (that was not cut size at that stage) and for glue and sellotape. Weight is in grams.
* 3 hacked servos: 3 x 1.7
* 3 propellers: 0.17
* Receiver: 0.68
* 80 mAh battery: 2.6
* 33 cm x 1mm diam. carbon rod: 0.4
* Battery lead: 0.3
* Depron fin (estimate): 0.5
* Allowance for tape and glue (estimate): 0.25
Total: 10g
So the concept promised to be suitable for 11-inch latex balloon (a common party balloon) or any balloon with a lift capacity of at least 10g. Ballast is added to achieve the desired buoyancy and removed again to compensate for the loss of helium over time.
A fresh 11-inch latex balloon should lift 11g at least (according to manufacturers reference data for 300m above see level), but you will soon notice a loss in lift capacity. In balloon shops latex balloons to be inflated with helium are commonly internally treated with “Hi-Float.” This makes them float longer. The one I bought lifted 14g (about 30m above sea level). I ended up using a 125mAh battery bringing the weight on 11g and allowing for about 3g of ballast. As expected regular trimming by removing ballast was needed and as after about 10 hours all ballast was removed. But that is not bad for a 1.5 EUR balloon.
A fresh 14-inch latex balloon however carries more than 20g so there is some room to last a couple of days (again with “Hi-Float”). For the camera version I had a 16-inch balloon with a lift capacity of over 35g available.
Foil balloons keep their helium much longer (up to weeks and can be refilled), but have a higher proper weight, making the minimum suitable sizes larger. My favorite foil balloon for a micro blimp is obviously the Zeppelin NT as sold by the Deutschen Zeppelin-Reederei GmbH and lifting about 21g. A nice alternative, more commonly available, is the 40-inch Letter “I”. Its lift capacity of 18g is quite tight for a camera version, but it is possible without the camera or with an extra lean build (like powering both camera and propulsion from the flight battery, see last step).
A note on the helium: for these small blimps pure (99% or something like that) is strongly recommended as there is little buoyancy to spare. But where gasses like “Ballonal”, a mixture of helium with nitrogen used to be popular, nowadays almost all balloon shops work with pure helium.
STEP 3: HACKING THE SERVOS
To hack each of the three servos start by removing stickers and the small band of shrink tubing holding it together. Remove the top part and remove all of the gears, including the pinion (if your propellers do not match the motor shaft, you can alternatively keep on the pinion and drill out the propeller to fit that). Remove the bottom part and carefully pull out the motor and pot. The motor most often comes out easy, the pot is glued in. Most often you can still pull it out by moderately pulling on the wires. I you feel unsure you can alternatively break open what is left of the servo casing, with small pliers.
Protect the circuit board from accidental short circuiting by wrapping a single layer of tape around it.
Test by connecting to the receiver with the propellers left off. Power up and trim each pot till the motor doesn’t move with the transmitter’s corresponding stick at neutral position.
Choose which motor/function you want on what stick. I usually put the up/down on what is normally the “throttle” (because a stick without auto centering is convenient here), the main propulsion on the “elevator” and the left/right on the “ailerons” (on a mode 2 transmitter).

Assembling the Receiver
STEP 4: ASSEMBLY
The receiver gets wrapped in sellotape too, before attaching it too the middle of the 1 mm carbon rod with a little more sellotape. I used a rod as long as possible for best manoeuvrability. With the gear used that was about 32 cm.
A battery mount is made with sellotape. Part of one strip of sellotape is covered with another layer of sellotape, sticky side to sticky side. This non sticking area should be at least as long as the battery’s circumference. At about 1/4 from the front side of the rod, stick one end perpendicular to the rod and fold the sticky end closed. Now make loop in which the battery fits and close it with the other sticky end left. You should be able to slide the battery in and out.
The servo motors are attached with little elastic bands. The front one is directed forward (main propulsion), at the back one is attached transversely (tail rotor). Check the connectors reach the receiver. If you use a transmitter without servo reverse (like the one shown), check the tail rotor is blowing the right way when moving the stick. If not, mount it the other way around. Putting on the propellers helps checking the correct alignment.
The third motor is mounted near the centre of gravity of the assembly, pointing down. Put on the propeller backwards as you want it at its best performance when pushing the blimp up.
Lock the motors in place with superglue. If you choose to cut off the elastic bands afterwards keep the drop of glue really tiny, sticking the elastic bands to the motor or rod as little as possible. After removing the elastic bands add some extra superglue. If that proves hard, don’t bother, as three small rubber bands will account for only about 0.1g. Obviously, keep any glue away from the shaft.

Attaching the Balloon
STEP 5: BALLOON ATTACHMENT AND TRIMMING
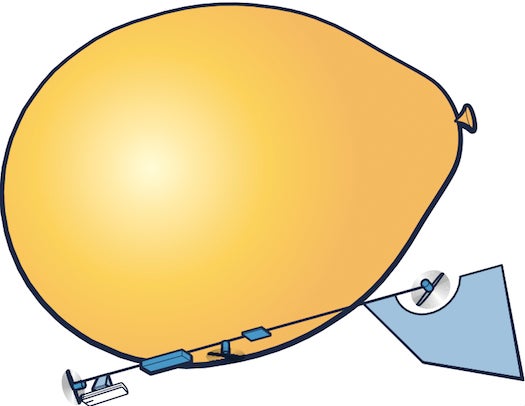
The assembly from the previous step is put on the balloon as shown. Two 4 cm pieces of tape should suffice. You might have to carefully shift it backwards or forward to have the blimp hang in the air with the rod more or less horizontally.
Final trimming is done with putty. The amount should be just enough to have the blimp slowly float down when no power is applied. The place you put the putty should help the final trim to have it hang horizontally.
When flying in high halls you should take in account that higher up and in warmer areas a blimp can have tendency to increase its buoyancy. So it is better to trim it a little heavier. The battery will run down a somewhat faster as you will need more power “up,” but it is better to be safe than sorry.
One advantage of using a latex balloon is that it will lose helium noticeably within hours and come down. When using a foil balloon you should take more care in trimming, as coming down can take days. A spare balloon on a string and double sided tape on top can be a real saver by allowing for some “inverted fishing.”

Fitting a Tail Fin
STEP 6: FLYING AND FITTING A TAIL FIN
When test flying, a tail fin proved to be very valuable to make flying straight forward reasonably easy. First the up/down propeller, albeit tiny, gives some spin to the balloon. Second, the tail rotor is clearly overpowered. A fin keeps the blimp on its straight path and the extra power still allows for short turning when desired.
The tail fin is made out of Depron and attached with some tape. I made it hanging down so it helps protecting the propellers from hitting floors or walls. Also it keeps the blimp some distance from any landing surface. This proved to be important as the middle propeller looses efficiency when pushing close to a surface, making lift-off difficult. So no hovercraft effect there.
Obviously the weight trimming needed to be corrected for the fin.
With a tail fin flying the blimp is not difficult, but full control will take some practice.
Moving forward does need to be compensated with more upwards propulsion. The front propeller speeds up the air under the balloon creating an upside down wing effect.
I usually start by giving up till the blimp keeps about the same height and then give it just a little more and start moving forward, adjusting the speed to keeping more or less the same height.
STEP 7: TIPS ON LOSING WEIGHT
As with 11-inch balloons there is not much lift capacity to spare, so losing half a gram or more is worth trying.
A relatively easy one is losing the potentiometer and circuit board of the middle motor and soldering the motor to the receivers built in ESC (if it has one, as the DelTang have). Obviously you lose the ability to reverse it, so you definitely to trim a little heavy. On the other hand you gain a lot in proportional control, compared to the servo circuit. You can also use it for the forward propulsion, sacrificing the backwards function. I would recommend the latter in larger rooms as in that case coming back down is probably more important than reversing.
If you’re up to some tiny soldering you can replace the potentiometers with two tiny (1 /10 Watt) 4,7 kOhm resistors.
You can consider to replace the connectors by soldering directly to the receiver, but to be able to use a 9″ balloon as I believe the Plantraco Nanoblimp does, one needs to bring it all below 6g. That will need another approach and another project. (If you’re interested, subscribe to me on Instructables).

Adding the Camera
STEP 8: ADDING THE CAMERA
I use a so-called “808 car key micro camera.” These miniature cameras come so cheap (under 10 EUR), they are ideal for experimenting. You will be needing a small Phillips screwdriver to dismantle it. If you go for the extra light version feeding from the flight battery, you will need an extra male and female plug compatible withe the flight battery and soldering equipment.
There is an abundance of information on the numerous variations on the market at Chuck Lohr’s non-commercial information site. Check it out before purchasing one. I have a so called #3 and a #8 and confirm the #3 is better, as recommended on the site.
Do not expect top quality, but something suitable for fun. The motion blur is quite severe, in particular at lower light conditions. But for me, the main disadvantage is their narrow view angle. I have ordered a wide angle Jelly lens to experiment on improving that, but it hasn’t arrived yet. So I will have to report on that later.
I stripped the camera from its disguise as a key fob, so it they weighs only about 10g. I covered it with some tape to avoid short circuiting the printed circuit board, but keeping free the Micro SD-Card slot and the mini USB port. The tape also keeps the actual camera in place, as it is attached to the printed circuit board with a flexible connection.
A folded Depron strip was taped to the camera to have it hang under the front motor.
If you want, you can power the camera on the flight battery, saving about 4g. In that case you will need an extra male and female battery plug to solder an extra connection in between the flight battery and the receiver (see the last 4 pictures). However I recommend not to charge the flight battery through the camera. The original battery seems to have some protecting/regulating circuit attached, while RC batteries count on the RC charger for that.

Spy Balloon